 |
| http://microcontrollerslab.com/wp-content/uploads/2019/02/2-PID-controller-Arduino.png |
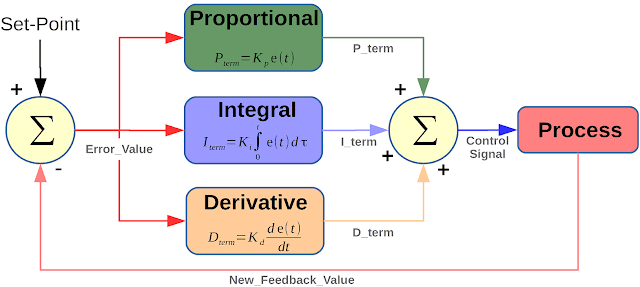
Pada kali kami akan memperkenalkan struktur kompensator umpan balik yang sederhana, namun serbaguna: pengontrol Proporsional-Integral-Derivatif (PID). Kontroler PID banyak digunakan karena sangat mudah dipahami dan karena cukup efektif. Salah satu daya tarik dari pengontrol PID adalah bahwa semua insinyur memahami diferensiasi dan integrasi secara konseptual, sehingga mereka dapat menerapkan sistem kontrol bahkan tanpa pemahaman yang mendalam tentang teori kontrol. Lebih lanjut, meskipun kompensatornya sederhana, namun cukup canggih karena ia menangkap sejarah sistem (melalui integrasi) dan mengantisipasi perilaku sistem di masa depan (melalui diferensiasi). Kami akan membahas pengaruh masing-masing parameter PID pada dinamika sistem loop tertutup dan akan menunjukkan bagaimana menggunakan pengontrol PID untuk meningkatkan kinerja sistem.
Perintah kunci MATLAB yang digunakan dalam tutorial ini adalah: tf , step , pid , feedback , pidtune
Kontent
- Gambaran umum PID
- Karakteristik Suku P, I, dan D
- Contoh Soal
- Tanggapan Langkah Loop Terbuka
- Kontrol Proporsional
- Kontrol Proporsional-Derivatif
- Kontrol Proporsional-Integral
- Kontrol Proporsional-Integral-Derivatif
- Tip Umum untuk Merancang Kontroler PID
- Penyetelan PID Otomatis
Komentar
Posting Komentar